== こういうものです ==
画面をクリックすると動画がスタートします。
上の動画は、3級と2級の問題を組み合わせて作ったシーケンスプログラム(ラダー)で動かしています。
- 手動の場合、PB2で左行、PB3で右行。複数ボタン同時押しでは、先押し優先。
- 自動では、パレットが右端にあるときのみ起動する。
- パレット左端で、パレット番号を表示し、右行中はパレット番号とディップスイッチの値の積を表示する。
- 手動に切り替えると非常停止がかかり、PL4が点滅。PB4で非常停止解除。
PB1~PB5はそれぞれ、キーボードの「Z」「X」「C」「V」「B」に割り当てられており、2つ以上の同時押しも可能です。
また、SS0とSS1は「A」「S」、DIPSWのUP/DOWNは「D」「F」にそれぞれ割り当てられています。
(全ての操作はマウスでも可能です。ただし、その場合、複数ボタン同時押しは出来ません。)
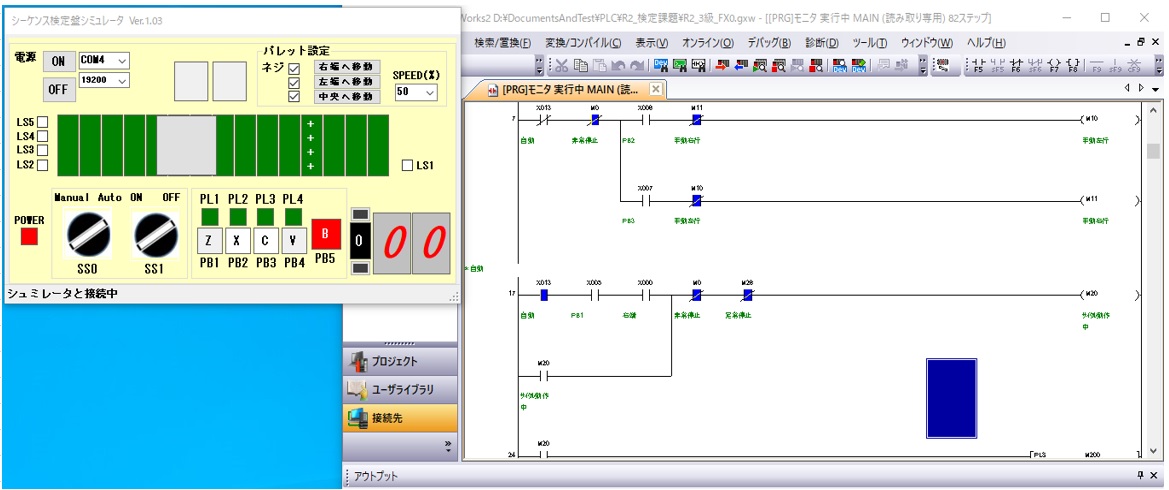
シミュレータとラダーを並べて表示、作業を行うことが出来ます。
(以下の画像は全てクリックすると拡大します。)
== 使い方 ==
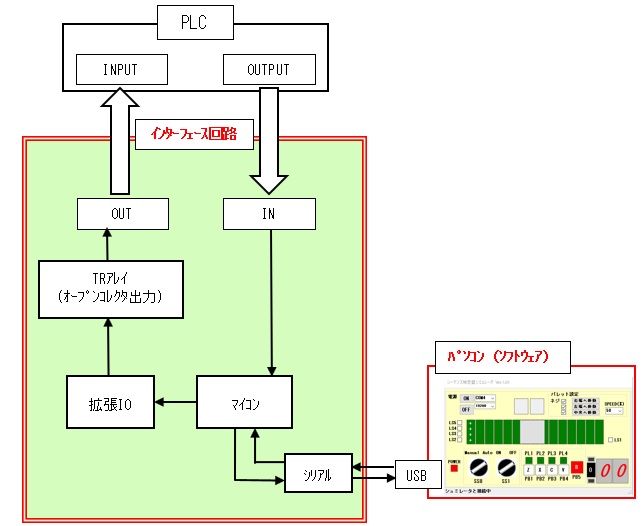
1.接続
PLCとインターフェース回路の入出力ケーブルを適切に接続します。
この時、PLCの電源はOFF、インターフェースのUSB端子は接続しない状態で行ってください。
2.起動手順
2-1.USBケーブルでインターフェース回路とパソコンを接続してください。(インターフェース回路の電源がONします)
2-2.パソコンのアプリケーションソフトを起動してください。インターフェース回路のポート番号が表示されます。
2-3.表示されたポートを選択し、ONボタンをクリックしてください。
2-4.PLCの電源をONにしてください。
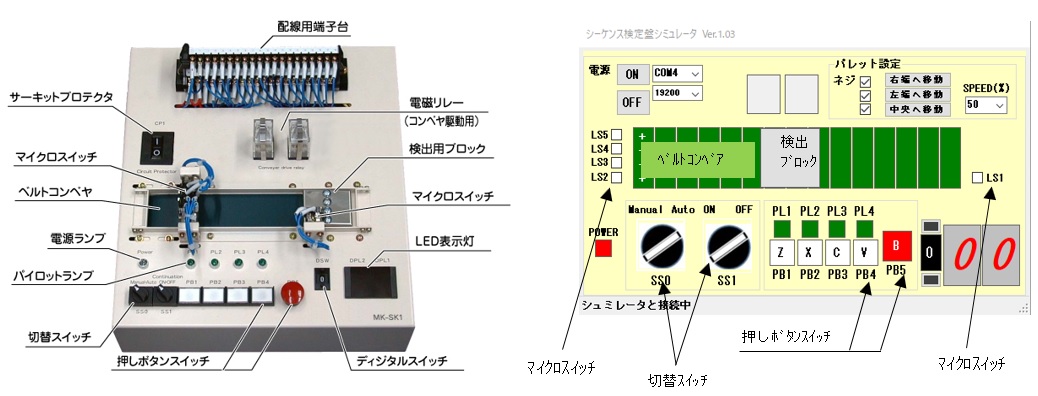
== 画面の説明 ==
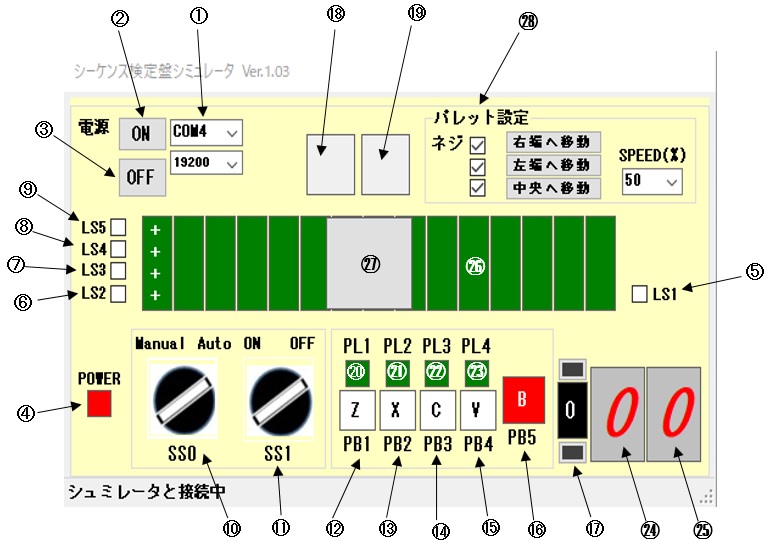
画面構成は以下の通りです。基本的には、実際の検定盤と同等の配置にしています。
| No. | 部品 | 検定盤 | シミュレータ |
|---|---|---|---|
| 1 | ポート選択 | - | インターフェース回路との接続ポートを選択します。 |
| 2 | 電源ON | 電源スイッチ(ON) | ①で選択したポートに接続し、シミュレータを使用可能な状態にします。 |
| 3 | 電源OFF | 電源スイッチ(OFF) | ポートを解放し、シミュレータを終了します。 |
| 4 | 電源インジケータ | 電源ランプ | シミュレータが使用可能な状態であることを示します。 |
| 5 | LS1 | 右端リミットスイッチ | ㉗パレットが右端に到達したときONします。マウスでもON/OFF可能です。 |
| 6 | LS2 | 左端リミットスイッチ | ㉗パレットが左端に到達したときONします。マウスでもON/OFF可能です。 |
| 7 | LS3 | パレットNo.読取スイッチ | ㉗パレットが左端に到達したときONします。 ㉘パレット設定と同じものがONになります。マウスでもON/OFF可能です。 LS3:bit1 LS4:bit2 LS3:bit3 です。 |
| 8 | LS4 | ||
| 9 | LS5 | ||
| 10 | SS0 | 自動/手動スイッチ | マウスクリックまたは「A」キーによって、自動/手動を切り替えます。 |
| 11 | SS1 | オプションスイッチ | マウスクリックまたは「S」キーによって、ON/OFFを切り替えます。 |
| 12 | PB1 | 押しボタン 1 |
マススクリックまたは、表示されたキーの押下(例:PB1=「Z」キー)でONします。 クリックしっぱなし、またはキー押しっぱなしでONしっぱなしとなります。 複数ボタン同時ONする場合には、キー押下を使ってください。(ON中はピンク色になります。) |
| 13 | PB2 | 押しボタン 2 | |
| 14 | PB3 | 押しボタン 3 | |
| 15 | PB4 | 押しボタン 4 | |
| 16 | PB5 | 非常停止ボタン | マススクリックまたは、「B」キーでONします。 |
| 17 | DIP SW | ディップスイッチ | 数字上下のボタンをマウスクリックすると、数値が変化します。「D」「F」キーでも可。 |
| 18 | 左行リレー | 左行モーター駆動リレー | 左行ON中は水色になります。 |
| 19 | 右行リレー | 右行モーター駆動リレー | 右行ON中は水色になります。 |
| 20 | PL1 | パイロットランプ 1 | PL1~PL4がON中はライトグリーンになります。 |
| 21 | PL2 | パイロットランプ 2 | |
| 22 | PL3 | パイロットランプ 3 | |
| 23 | PL4 | パイロットランプ 4 | |
| 24 | DPL1 | 7セグLED 1 | PLCからのBCD出力を受けて、00~99を表示します。 |
| 25 | DPL2 | 7セグLED 2 | |
| 26 | コンベア | ベルトコンベア | ベルトコンベアを簡易アニメーションで表示します。 |
| 27 | パレット | パレット | パレットを簡易アニメーションで表示します。 |
| 28 | パレット設定 | - | パレットネジ:パレットNoを設定するためのチェックボックスです。LS3~5に対応します。 |
| 右端へ移動:パレットを強制的に右端に移動します。 | |||
| 左端へ移動:パレットを強制的に左端に移動します。 | |||
| 中央へ移動:パレットを強制的に中央に移動します。 | |||
| SPEED:パレットの移動速度です。移動時間を稼ぎたいときなどに使います。 |